TriPMA Framework Overview
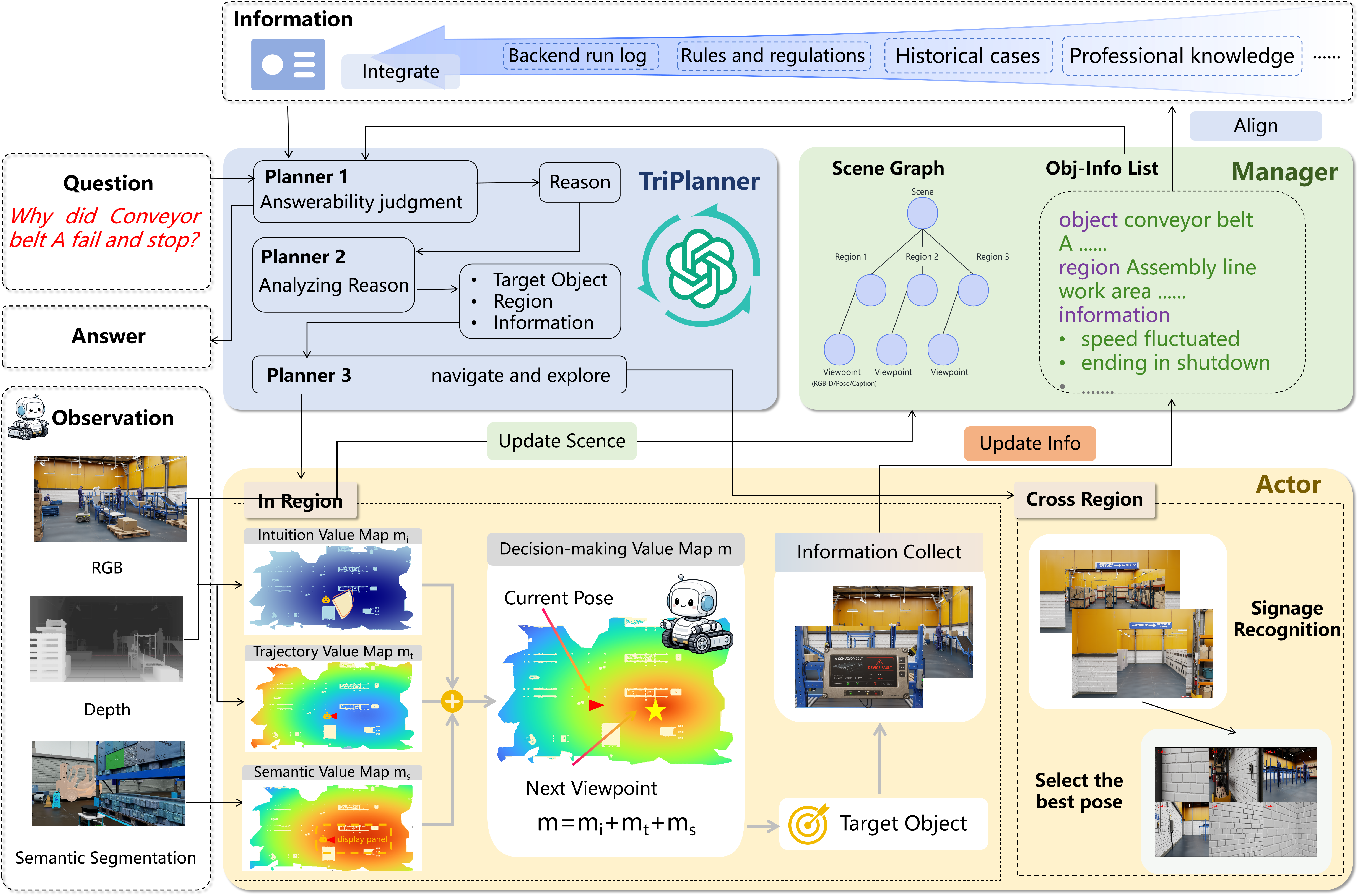
Fig. 1. Overview of the proposed TriPMA framework.
A concrete workflow example of TriPMA. Given the question ``Why did conveyor belt A fail and stop?'', reasoning over physical and informational spaces, the agent navigates across regions (Assembly line work area ——> Electrical room), maintains an object information list, collects physical observations and digital information on demand, and dynamically updates the scene graph until the question becomes answerable.